

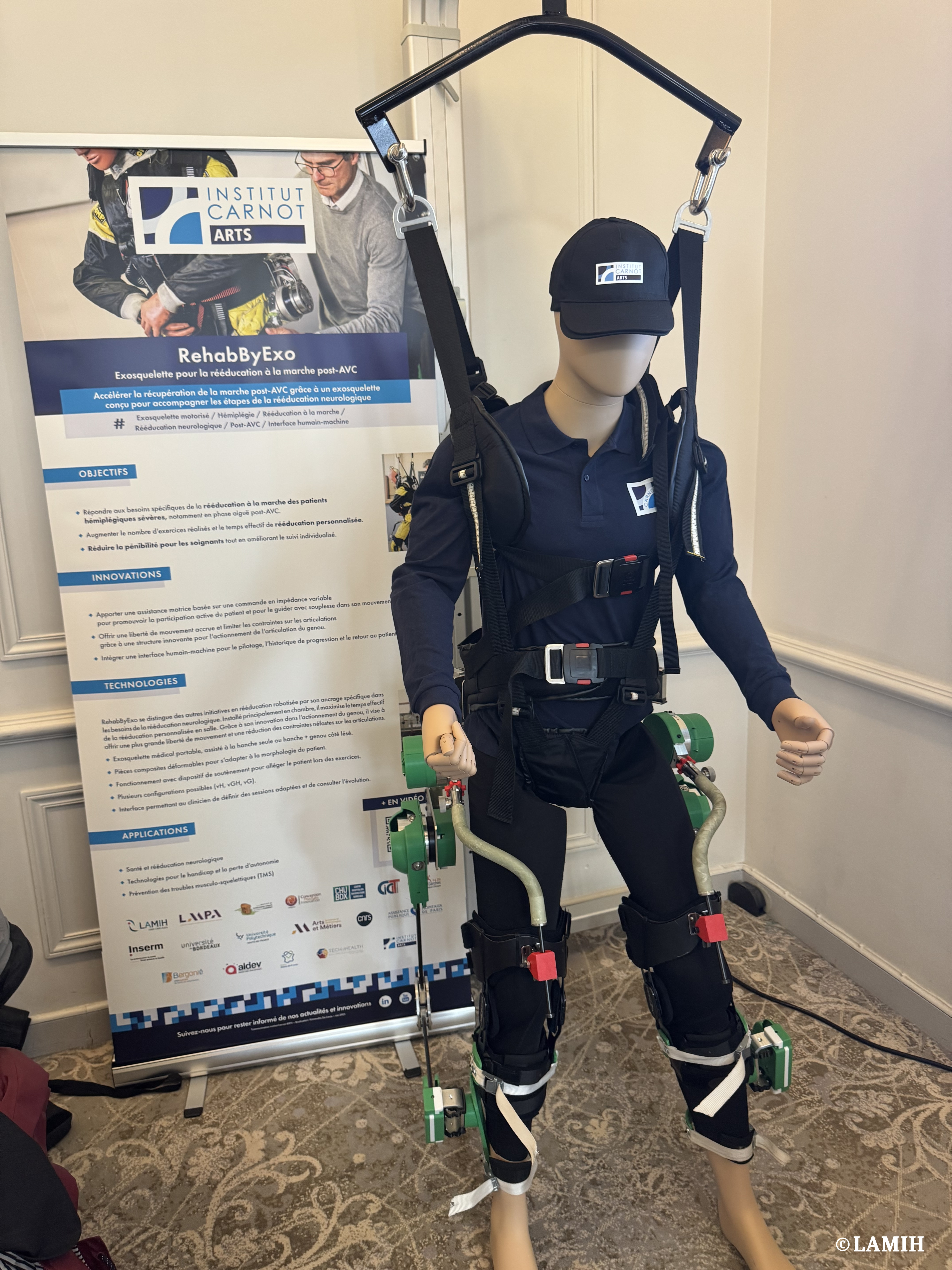
RehabXO
Exoskeleton with man-machine interface for post-stroke gait rehabilitation in hemiparetic patients: development and clinical evaluation.
The project partners aim to develop an exoskeleton specifically designed for the post-stroke gait rehabilitation of hemi paretic patients.
Robotic rehabilitation for post-stroke walking increases the chances of long-term recovery. In particular, it has shown a gain in walking speed and quality for patients. However, rehabilitation protocols involving the use of an exoskeleton are still often limited to the repetition of tasks imposed on both legs, which is not always suitable for hemiparetic patients and does not encourage their active participation.
In this context, the project partners (CHU de Bordeaux, CIC-IT de Bordeaux, LAMIH, IBHGC, LAMPA) aim to develop an exoskeleton specifically designed for the post-stroke gait rehabilitation of hemiparetic patients providing:
- A catalog of specific protocols, such as a single-leg imposed gait movement or straight-line walking with variable step length and pace,
- Adaptive gait trajectories, generated from biomechanical gait models, enabling the assisted injured limb to be synchronized with the unassisted healthy limb,
- "As-needed" assistance control (based on variable impedance control) to encourage active patient participation as these abilities evolve during rehabilitation,
- The customization of a human-machine interface (HMI) on the one hand addressed to the physiotherapist and on the other adapted specifically for the hemiparetic patient.
Our hypothesis is that the RehabXO device will enable early, personalized, safe and effective rehabilitation of post-stroke hemiparetic patients.
The partners have been working together since 2019 on the RehabByExo project, initially funded by the Carnot ARTS Institute and focusing on the design of initial exoskeleton prototypes.
The specific aims of the new RehabXO project are to:
- Evaluate the safety and feasibility of the existing "hip version" (vH) prototype with its current HMI,
- Develop the "hip-knee version" (vGH) prototype complete with its improved physiotherapist/patient-specific HMI,
- Demonstrate the safety, feasibility and post-stroke rehabilitation performance of the vGH prototype in a clinical evaluation.
The ultimate goal is to propose a robotized post-stroke gait rehabilitation that is as close as possible to the specific rehabilitation needs of hemiparetic patients.
| Department(s) | Partner(s) | Overall amount |
|---|---|---|
|
1000 k€
|
||
| Main support | Rayout | Date(s) |
|
Agence Nationale de le Recherche (ANR, 522 k€) |
National |
2026 - 2031
|

{kind=link}